Собери робота "Крейзибот"


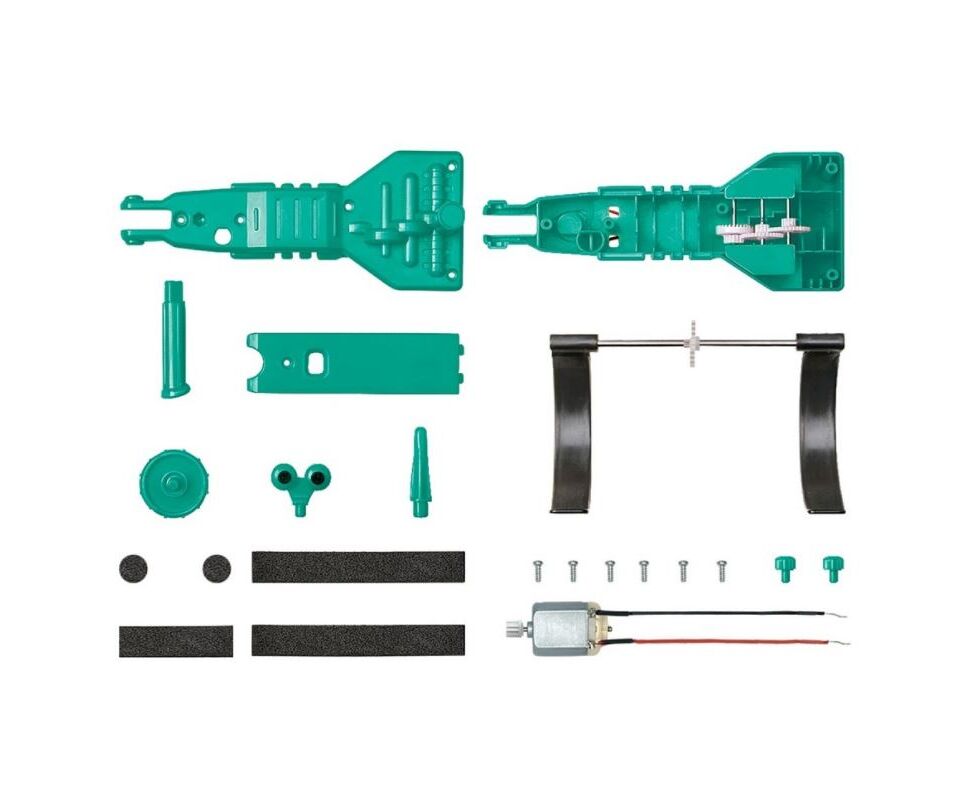



Система шестеренок в редукторе снижает скорость вращения мотора и передает движение оси, на которой закреплены ноги. Поэтому ноги двигаются гораздо медленнее, чем крутится мотор. Изогнутые ноги отталкиваются от пола, благодаря чему робот двигается прыжками. Когда колесо упирается в стену, толчок ног поднимает его по стене. Робот переворачивается назад на штыре и снова может двигаться: теперь в другую сторону.
Рекомендуемый возраст
8+
Упаковка
Картонная коробка
Размер в упаковке
24 х 17 х 6,5 см
Производитель
Green Science
Страна изготовитель
Китай
Сообщения не найдены